
| Flight Modeling in Helo Sims
by Zero G |
||||
|
Retreating Blade Stalls It is very nice to see a company put retreating blade stalls in a sim even though the crash caused by this is not modeled correctly in the game. I will give you the full explanation for RBS so you can see its real cause and effect for a single rotor helo.
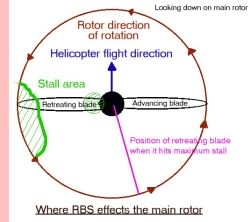 The speed at which the retreating blade tip will stall is dependent on the total pitch of the blade. This pitch is the product of the collective setting as well as that of the cyclic. The collective setting will vary according to the load of the helo, the atmospheric density and the rotor RPM. As speed of the helo is increased the cyclic requirements increase and retreating blade pitch is built up until finally the stalling angle is exceeded. Since the relative airflow meets the retreating blade at the steepest angle at the tip, it follows that the outer segment of the blade will be the first part to stall due to excessive pitch. The effects have shown to take place slightly aft of the lateral position. 90-degree phase-lag delays the maximum flap to just beyond the full rear position. The pilot feels this stall as the nose pitches up and the helo has a tendency to roll towards the advancing blade. The roll can happen towards the retreating blade but it is fairly rare. None the less the roll will be vicious and could well be beyond control. If the pilot ignores the vibrations that lead up to this condition they must avoid trying to counter the nose pitching up by using the cyclic. This will increase the angle of attack and make the stall worse. If collective is lowered the blade will not have a sufficient AoA (angle of attack) to remain stalled. In Apache Havoc RBS is not something that you can recover from, but in most cases you probably wouldn't anyway. Just keep a close eye on your speed and all should go well. Hopefully Comanche Hokum will allow you to lower the collective when you see the vibrations to keep the rotor from entering this state. Apache Havoc does other things right, like the ground effect model. The ground effect is just the cushion of air through which your helo will acquire extra lift while it is close to the ground. There are several different theories as to how high a helo may rise with ground effect still present, but it is generally one to one and a half rotor lengths from the ground. In A-H the effect from rising beyond ground effect is a little weak but it would have been right when this sim had vortex ring state in the flight model. (Most of you know that this was removed at the request of beta testers because it was killing them on a regular basis.) On the other hand, the effect on the main rotor if you are to fly over a building is pretty well done but it really shouldn't happen when you fly over trees. This is an area that can be a problem for helicopter pilots. If you stop to hover above trees with a heavy helo you could easily sink into the trees because you will not have help from the ground effect. |
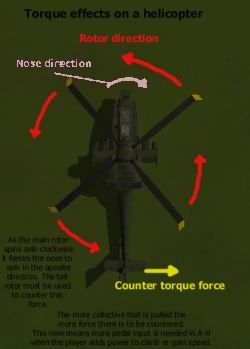 Apache-Havoc also handles tail rotor failures very well; I only wish that there were a throttle modeled so that they could be handled with proper procedure. Many people may not know that it is possible to land a helicopter without the tail rotor but it is an emergency that we train for. I bet a lot of you thought that a helo would lose control the moment a tail rotor failure happened. This is correct if you are in a hover, but as long as you have airspeed the airframe aerodynamics will prevent the helo from spinning out of control. A real danger, however, would be that tail rotor failure might take a large section of the tail boom with it. This would cause a loss of balance and the pilot might not have enough movement in the cyclic to hold the helicopter from going over forwards. Any total failure of the tail rotor would have to be landed with what might be a very ugly autorotation. The flight model in A-H handles combat maneuvers very nicely. Smooth, quick stops are fairly easy to pull off. (When a pilot wants to stop fast, the cyclic is pulled back and the collective is dropped so that the helo will stop without altitude gain. Collective is then reapplied along with pedals as needed so that the helicopter doesn't lose altitude or change heading.) Steep turns can also be handled in A-H without loss or gain in altitude. Apache pilots are limited to 60 degree banks and + - 30 degrees forward \ rearward tilt. Pop-ups can be done with relative ease and terrain masking is no problem at all. Descending from mountaintops can be done properly by lowering the collective, not by diving. That is a good way to get into a RBS situation. Slowing down for a landing is very well done in A-H, and getting right above your set landing spot is as tough as it should be. Landing has the same ground handling problems as take off, but they are more obvious here in A-H because the helicopter will not fall so that all wheels are touching the ground. Again, this is stuff I hope to see fixed in Comanche-Hokum. I am sure that there are parts of the flight model that I left out because they are just where they should be so I don't even think about them. If you see anything I missed let me know. Questions and comments are welcome as always, just post them in the COMBATSIM.COM™ forums or to Zero G. See also our Apache Havoc Review Join a discussion forum on this article by clicking HERE.
|
|||
|
Copyright © 1997 - 2000 COMBATSIM.COM, INC. All Rights Reserved. Last Updated July 13th, 1999 |
||||